400-816-0502

步进电机驱动器细分是利用励磁电流分步进行的原理。让电机固有的步距角阶梯运行。 1细分为原有步矩角1.8度(这是2相最常规的,还有0.9等等)。 2细分就是0.9度,以此类推。
以两相步进电机为例,零细分时,一步电机轴转动1.8°,在16细分是16步电机轴转动1.8°在步进电机驱动电路中,我们需要去关注它的驱动能力、控制精度、内阻大小、工作电压、封装尺寸、噪音和驱动响应速度等参数。
以山社步进电机驱动器MD-2322为例:
?电源电压:8-32VDC
?输出电流:拨码开关设定,16种选择,最大2.2A(峰值)
?电流控制:PI 电流控制算法,高速大力矩输出,低震动,低噪音,低发热
?细分设置:拨码开关设定,16种选择
?速度范围:选配合适的步进电机,最高可达3000rpm
?共振抑制:自动计算共振点,抑制中频振动
?系统自测:驱动器上电初始化自动检测电机参数并由此优化电机电流算法和抗共振电子阻尼系数
?控制方式:脉冲&方向模式(默认)双脉冲、受控自运行、持续自运行内置跳线可选
MD-2322细分设定:
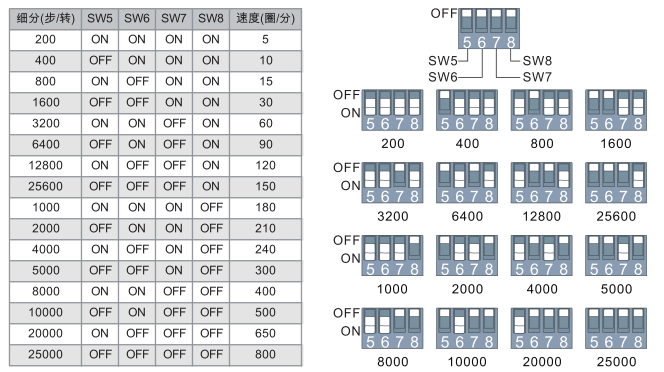
细分数就是指步进电机运行时的真正步距角是固有步距角(整步)的几分指一。以MD-2322的200细分为例:驱动器工作在200细分状态时,其步距角只为‘电机固有步距角’的两百分之一,也就是说:当驱动器工作在不细分的整步状态时,控制系统每发一个步进脉冲,电机转动1.8°;而用细分驱动器工作在200细分状态时,电机只转动了0.009° ,这就是细分的基本概念。

粤ICP备09049455号 版权所有:深圳市美莱克科技有限公司
粤公网安备 44030602003839号
互联网品牌服务:CTM



